



 无人驾驶飞行器(UAV)或无人机的能力稳步扩展,以涵盖各种应用。无人机广泛用于测量和映射,航空摄影,有效载荷携带,资产检查,目标测试和空中监控应用。由于在战略性重要和环境具有挑战性的条件下,他们对军事目的的用途造成了巨大的关注。UAV通常配备“AutoPilot”,按照计划的目标执行任务目标。为了控制,稳定和引导UAV,“自动驾驶仪”从惯性测量单元(IMU)或惯性导航系统(INS)中获取运动参数,并且可选地从激光雷达传感器中获取。这些传感器在很大程度上有助于“自动驾驶仪”操作的性能参数。市场上的市售无人机/无人机主要使用现成的自动驾驶仪硬件来提供解决方案。这些消费者级无人机使用IMUS性能非常差。因此,在专业的自动驾驶仪中优选用于集成外部IMU和GPS或使用INS,而不是使用商业'自动驾驶仪硬件的低性能内置IMUS。
无人驾驶飞行器(UAV)或无人机的能力稳步扩展,以涵盖各种应用。无人机广泛用于测量和映射,航空摄影,有效载荷携带,资产检查,目标测试和空中监控应用。由于在战略性重要和环境具有挑战性的条件下,他们对军事目的的用途造成了巨大的关注。UAV通常配备“AutoPilot”,按照计划的目标执行任务目标。为了控制,稳定和引导UAV,“自动驾驶仪”从惯性测量单元(IMU)或惯性导航系统(INS)中获取运动参数,并且可选地从激光雷达传感器中获取。这些传感器在很大程度上有助于“自动驾驶仪”操作的性能参数。市场上的市售无人机/无人机主要使用现成的自动驾驶仪硬件来提供解决方案。这些消费者级无人机使用IMUS性能非常差。因此,在专业的自动驾驶仪中优选用于集成外部IMU和GPS或使用INS,而不是使用商业'自动驾驶仪硬件的低性能内置IMUS。 精度
精度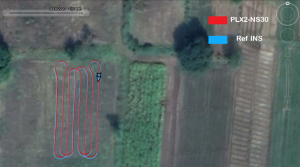










一种用于无人机导航的微型惯性导航系统
无人机,通常被称为“无人驾驶飞机”,在众多应用中得到了越来越多的应用。早些时候,无人机仅限于军事和地理测绘和参考任务,现在已经被用于运送包裹、搜寻飓风等任务,

Bharat Shakti采访了Aeron系统的Abhijeet Bokil和Ashvani Shuklabob手机体育下载官网地址
Aeron Systembob手机体育下载官网地址s的创始人Abhijeet Bokil和Ashvani Shukla在2018年印度钦奈Defexpo上接受了采访。bob手机体育下载官网地址伊伦系统公司,国内惯性导航系统的开发商和制造商,在这次博览会上推出了一款微型惯性导航系统“波勒克斯”。在这个视频中,Abhijeet和Ashvani谈论了它的特性和可能的应用。

bob手机体育下载官网地址在2018年金奈Defexpo上,Aeron Systems推出了其微型INS污染者号
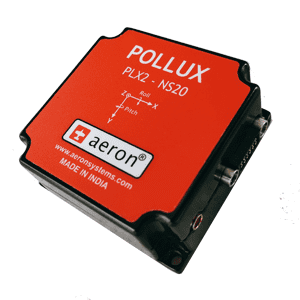
bob手机体育下载官网地址在2018年4月11日至14日在金奈举行的2018印度防务博览会上,总部位于普纳的惯性导航系统开发商和制造商Aeron Systems推出了其INS系列产品的最新产品“波勒克斯”。“污染者”由空军副参谋长空军元帅S B Deo推出。污染者将Aeron公司专有的基于bob手机体育下载官网地址卡尔曼滤波器的参数估计引擎与高速处理能力相结合,以高更新速率提供位置、地面速度和方向信息。它的重量仅为40克,体积非常紧凑,被广泛应用于士兵导航、机器人、无人机和其他地面和空中平台。

基于INS-GPS的个人导航解决方案
传统上,惯性导航是一项昂贵的技术,这限制了它在高端军用车辆、精确制导导弹或飞机上的应用。自从MEMS技术和低成本陀螺仪和加速度计问世以来

MEMS INS GPS:机器人应用的理想导航解决方案
机器人在家庭和商业用途上的使用正在迅速增长。随着机器人成本的下降和它们的多功能性的增加,更多的任务和家务将由机器人完成。精确和准确的导航辅助对于机器人正常工作和执行它们的有序任务是绝对必要的。
用于无人驾驶车辆的惯性导航系统
化石燃料汽车的发明给我们的生活带来了巨大的改变。更快捷便捷的交通提高了生产力,加速了各个领域的增长。

陀螺仪及其类型
陀螺仪是惯性导航系统的最重要部分或任何指导系统。陀螺仪被发明了一个世纪前,已被用作知道移动体的惯性状态的参考。从Kettering Bug到Apollo SpaceCraft,